Available MSc topics
Must read: brief instructions and rules
For all students interested in the MSc theses done so far in CRTA, you can view the theses here. All MSc theses done within the old laboratory were defended before 2021. All theses from 2021 and 2022 were created and implemented within CRTA. Students who choose a master thesis topic expect active engagement and responsible work on the assigned topic. All students who choose a master's thesis in one of the provided topics will be equipped with all necessary equipment, workstations, and (shared) computers in the laboratory and/or practicums. If the thesis involves an experimental part, students will be enabled to access to the appropriate laboratory where the experiments will be carried out: Laboratory for Autonomous Systems, Laboratory for Medical Robotics, or Laboratory for Artificial Intelligence. In addition to working in laboratories, students also have access to two practicums whose occupation schedules can be seen here. While working in the laboratories and practicums, students must adhere to all rules of behavior as well as rules for the use of the computer, laboratory, and other equipment. After work, it is necessary to leave the workstations in CRTA clean and tidy.
In addition to laboratories and laboratory equipment, in the student section of CRTA, students have their 3D printers, various student tools, and equipment that are necessary for a large number of topics that include practical experimental work.
Researcher Luka Rabuzin is responsible for working with students and other tools, and he will provide you with all the necessary guidelines when you start working on your topic.
For any general questions and experiences, you can always reach out to our current students, graduates, or demonstrators.
What is a "Project" and how is it related to the master's thesis?
The project in the 9th semester of studies, which precedes the enrollment of the master's thesis, is a necessary prerequisite for applying for the master's thesis topic, especially if the mentor or comentor is a professor from the CRTA. The project topic is closely related to the master thesis topic and forms a cohesive unit with the thesis. When registering the project in the Studomat, it is necessary to agree with the future mentor or comentor on the scope of the project. The project typically involves solving specific parts of the master's thesis topic (addressing certain aspects of the described topics). The project is submitted to the mentor (and comentor) in digital format.
Writing and submission of the MSc thesis
The master's thesis should be written in accordance with the official guidelines and template for the master's thesis, which can be found here. Before writing the thesis, it is necessary to thoroughly study all the materials and contact mentor or comentor for any questions.
Before starting to write the thesis, it is suggested to discuss the structure of the thesis with the mentor or comentor. Considering the chosen submission deadline for the master's thesis, the complete written thesis should be submitted to the mentor or comentor for review (Word and PDF formats) via email at least 10 days before the official submission deadline. The thesis sent for review must be complete free of spelling or grammar errors (make sure to perform a spell check using ispravi.me).
List of available topics
- Development of an end-effector for physical human-robot interaction and physiotherapy
- Upravljanje robotskom medicinskom bušilicom i eksperimenti bušenja kranijalne kosti (za više informacija javiti se doc. dr. sc. Marku Švaci)
- Istraživanje i razvoj robotski potpomognutog sustava za navigaciju kirurga prilikom operacije koljena (za više informacija javiti se doc. dr. sc. Marku Švaci)
- Upravljanje flotom mobilnih robota u ROS2 okruženju
- Development of an interactive setup for the game of Tic-Tac-Toe
- Autonomno punjenje električnih vozila koristeći robotsku ruku
- Dual-handed assembly of a fuse housing
- Robotic handling of objects in an unstructured state
- Izvršavanje naprednih misija primjenom robota KUKA KMR iiwa i robotskog operativnog sustava (ROS2) – zauzeto
Popis tema 2023./2024. – doc. dr. sc. Filip Šuligoj
- —(rezervirano)—Ekstrinzična kalibracija robotskog in-hand stereovizijskog sustava pomoću neuronskih mreža
- Estimacija Pozicije Glave Pacijenta u 3D Snimkama Računalne Tomografije s Primjenom u Robotiziranoj Neurokirurgiji
- —(rezervirano)—Kontrola sile pomoću robotskog sustava za interakciju s zakrivljenim površinama
- —(rezervirano)—Integracija metoda strojnog vida i učenja za automatiziranu detekciju, lokalizaciju i verifikaciju mikroprocesorskih pločica
- —(rezervirano)—Robotski sustav za autonomnu navigaciju i manipulaciju objektima
- Automatizacija ekstrinzične kalibracije “Oko-u-Ruci” robotskog sustava
- Razvoj i implementacija sustava za kontrolu i praćenje pakiranja s integracijom mjernih vaga i vizijskog Sustava
If you are interested in an area or topic that is not suggested, feel free to suggest your own topics, ideas and projects to one of the CRTA employees, and then you can discuss your topic proposal with a potential mentor and/or comentor and collaborators on the topic. For any other questions, feel free to email the teacher responsible for a specific topic or visit them during consultation hours.
Detailed description of available topics
Ekstrinzična kalibracija robotskog in-hand stereovizijskog sustava pomoću neuronskih mreža
Ovaj rad istražuje upotrebu neuronskih mreža za ekstrinzičnu kalibraciju robotskog in-hand stereovizijskog sustava, ključnog za preciznu lokalizaciju u prostoru. Ovi sustavi nalaze primjenu u industriji, medicini i znanstvenom istraživanju. Konvencionalne kalibracijske metode često su suboptimalne zbog izazova kao što su šum i optičke nelinearnosti. Rad predlaže neparametarsku kalibraciju temeljenu na neuronskim mrežama, koja povećava robusnost i fleksibilnost sustava, te omogućuje automatizaciju procesa, unapređujući time efikasnost i brzinu kalibracije.
U radu se koristiti postojeći stereo vizijski sustav, s makro objektivima i automatskim algoritmom za preciznu lokalizaciju retroreflektivnih sfera. Stereo vizijski sustav treba uz inkrementalne pomake robotske ruke u zadane pozicije strukturirano pohranjivati 3D pozicije robota i piksel koordinate centara lokalizirane sfere, koji zajedno čine kalibracijski trening set za neuronsku mrežu.
Istraživanje obuhvaća sljedeće korake:
- Programirati robota i komunikaciju sa stereo-vizijskim sustavom za proceduru izrade kalibracijskog seta podataka
- Predložiti veličinu i konfiguraciju seta za potrebe treniranja neuronske mreže (za lokalizaciju se koriste referentne retro-reflektivne sfere)
- Istražiti i implementirati modele neuronskih mreža koje mogu učinkovito povezati koordinate centara sfera u slikama stereo-vizijskog sustava s poznatim 3D robotskim pozicijama.
- Evaluirati utjecaj različitih modela i parametara neuronskih mreža na točnost i robusnost kalibracije
- Validirati točnost ekstrinzične kalibracije pomoću neuronske mreže korištenjem pozicija koje nisu bile dio trening seta i računanjem euklidske greške (poznato i očekivano).
Rad treba sadržavati pregled relevantne literature i detaljno opisati korištene metode i algoritme, kao i evaluaciju dobivenih rezultata u kontekstu primjenjivosti u stvarnim aplikacijama. Također je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Estimacija Pozicije Glave Pacijenta u 3D Snimkama Računalne Tomografije s Primjenom u Robotiziranoj Neurokirurgiji
Rad se fokusira na robusnu estimaciju pozicije glave pacijenta u 3D snimkama računalne tomografije (CT), što je od presudne važnosti u kontekstu rastuće automatizacije i primjene robota u neurokirurgiji. Stereotaktičke operacije na mozgu, koje se sve češće izvode uz pomoć robota, zahtijevaju visoku preciznost u lokalizaciji tumora i drugih patoloških stanja. Estimacija pozicije glave postaje stoga ključni element za uspjeh ovakvih kirurških zahvata. Iako su informacije o položaju glave često dostupne kao metapodaci u DICOM formatu, njihova potvrđena točnost je imperativ zbog kliničkog utjecaja.
Metodologija istraživanja uključuje:
- Razvoj i implementaciju algoritama za preciznu estimaciju pozicije glave temeljenih na geometrijskoj analizi facijalnih karakteristika i antropomorfnih orijentira (npr. nos, oči).
- Primjenu i evaluaciju različitih metoda, uključujući analizu svojstvenih vrijednosti i filtraciju biomedicinskih slika na temelju Hounsfieldovih vrijednosti za tkiva različite gustoće.
- Usporedbu i analizu točnosti i robusnosti različitih pristupa, s posebnim fokusom na njihovu primjenjivost u robotiziranoj neurokirurgiji.
- Validaciju metoda korištenjem neovisnih, realnih (anominiziranih) CT snimaka ljudske glave.
Rad će obuhvatiti sveobuhvatan pregled relevantne literature, detaljni opis korištenih metoda i algoritama, te evaluaciju dobivenih rezultata s obzirom na njihovu kliničku primjenjivost. U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Kontrola sile pomoću robotskog sustava za interakciju s zakrivljenim površinama
Funkcionalnost kontrole sile postaje sve značajnija u modernoj robotici, gdje se od robota očekuje ne samo sposobnost vizualne percepcije okruženja, već i napredna interakcija sa istim. Ovo uključuje sposobnost robota da interpretira i reagira na različite fizičke parametre, kao što su sila i moment, u realnom vremenu. Takva vrsta interakcije omogućuje robotima da se adekvatno prilagode složenim i dinamičnim okruženjima, što je ključno za buduće primjene u industriji, zdravstvu i drugim sektorima.
Za ovu svrhu u radu se predlaže koristiti ROS2 (Robot Operating System 2), koji omogućuje integraciju i kontrolu različite opreme i njihove funkcionalnosti. Kao hardverska komponenta koristi se Franka Panda robot u kombinaciji s Realsense D435 dubinskom kamerom.
Zadaci istraživanja uključuju:
1. Dizajniranje prilagodljivog robotskog alata (dubinska kamera u ruci i sferni krajnji alat) koji se može montirati na postojeću čeljust i zakrivljeni radni komad.
2. Upotreba ROS2 za integraciju funkcionalnosti i kontrolu robota te akviziciju podataka point clouda.
3. Implementacija kontrole sile kako bi se održavao konstantan kontakt sa zakrivljenom površinom.
4. Postavljanje scenarija u kojem robot pomiče alat kako bi pokrio linearni put, planiran na temelju oblaka točaka dobivenog dubinskom kamerom, preko zakrivljene površine održavajući konstantnu silu.
5. Analiza rezultata, posebno točnosti pri održavanju konstantne sile i planirane putanje. Rad će sadržavati detaljan pregled literature koja je relevantna za kontrolu sile i vizualizaciju u robotici. Također će se opisati metode i algoritmi korištene za implementaciju kontrolnih shema i akviziciju oblaka točaka. Evaluacija će se provesti kako bi se utvrdila točnost i robusnost implementirane kontrole sile na zakrivljenim površinama. U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Integracija metoda strojnog vida i učenja za automatiziranu detekciju, lokalizaciju i verifikaciju mikroprocesorskih pločica
U kontekstu brzog razvoja tehnologije i masovne proizvodnje sofisticiranih elektroničkih komponenti, kontrola kvalitete ostaje izazovna i ekonomski zahtjevna. Posebno je strojni vid, koji koristi tehnologiju kamere za prikupljanje informacija, postao presudan alat u industrijskim kontrolnim procesima. U ovom radu integriramo kombinaciju strojnog vida i učenja, konkretno neuronskih mreža, za kontrolu kvalitete kod mikroprocesorskih pločica.
Specifični zadaci istraživanja obuhvaćaju:
- Akvizicija slika navedenih mikroprocesorskih pločica pod različitim uvjetima osvjetljenja i orijentacija, koristeći industrijsku kameru.
- Anotaciju i kreiranje seta podataka za treniranje neuronske mreže.
- Primjena YOLO (You Only Look Once) neuronske mreže i algoritama strojnog vida za detekciju, lokalizaciju i verifikaciju elemenata na različitim mikroprocesorskim pločicama kao što su Arduino UNO, Jetson NX Xavier, Raspberry Pi, STM32 i UP board.
- Analiza i evaluacija performansi modela u različitim uvjetima, fokusirajući se na robusnost modela u kontekstu varijacija u orijentaciji, oštećenjima objekata i uvjetima osvjetljenja.
U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Robotski sustav za autonomnu navigaciju i manipulaciju objektima
U kontekstu razvoja autonomnih robotskih sustava za industrijske i logističke aplikacije, ovaj rad fokusira se na integraciju autonomne mobilne platforme s robotskom rukom. Specifični hardver uključuje Waypoint Vector mobilnu robotsku platformu, Franka Emika Panda robotsku ruku s kontrolerom, UPS sustav za napajanje i računalo. Ova konfiguracija pruža nove mogućnosti za automatizaciju različitih zadataka, koji zahtijevaju navigacija i manipulaciju objektima.
Specifični zadaci istraživanja su sljedeći:
- Dizajn, sastavljanje i povezivanje svih fizičkih komponenti sustava, uključujući mobilnu platformu, robotsku ruku, UPS i računalo.
- Konfiguracija ROS okruženja i njegova integracija sa svim fizičkim komponentama sustava.
- Demonstracija sposobnosti autonomnog kretanja mobilne platforme do višestrukih fizičkih lokacija unutar Laboratorija (u prostoru CRTA).
- Demonstracija izvođenja zadatka paletizacije koju robotska ruka treba obaviti na odabranim lokacijama.
- Analiza i evaluacija performansi sustava za potvrdu robusnosti i učinkovitosti predložene implementacije.
U radu je neophodno citirati relevantnu literaturu i metode te navesti moguću pomoć dobivenu od mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Automatizacija ekstrinzične kalibracije “Oko-u-Ruci” robotskog sustava
U svjetlu sveprisutne primjene robotskih sistema u industriji i istraživanju, ovaj rad fokusira se na razvoj i implementaciju automatskog sustava za kalibraciju prostornog odnosa između robotske ruke i ugrađenog 3D vizijskog sustava. Točnije, cilj je izračunati matricu transformacije između prirubnice robota i koordinatnog sustava 3D kamere, poznate kao ekstrinzična kalibracija u “oko-u-ruci” konfiguraciji.
Specifični zadaci diplomskog rada uključuju:
- Pregled i implementacija metoda za kalibraciju: proučavanje i analiza postojećih metoda za ekstrinzičnu kalibraciju, s implementacijom odabrane metode.
- Dizajniranje i izrada nosača za 3d kameru: projektiranje i izrada nosača koji će omogućiti montiranje 3d kamere na prirubnicu robotske ruke.
- Konfiguracija operativnog i programerskog okruženja: instalacija i postavljanje potrebnog softverskog okruženja, uključujući operativni sustav i programerske alate, za učinkovitu komunikaciju i kontrolu sustava.
- Uspostava komunikacijskog protokola: razvijanje i testiranje komunikacijskog protokola između robota, računala i 3d vizijskog sustava.
- Izrada kalibracijske procedure i programa: razvoj softverskog rješenja koje, u kombinaciji s kalibracijskim objektom, automatizira proces kalibracije 3d kamere.
- Evaluacija točnosti kalibracije: provođenje eksperimentalnih mjerenja i analize kako bi se utvrdila točnost i robusnost implementiranog kalibracijskog procesa.
U radu je neophodno citirati relevantnu literaturu i metode te navesti moguću pomoć dobivenu od mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Razvoj i implementacija sustava za kontrolu i praćenje pakiranja s integracijom mjernih vaga i vizijskog Sustava
Ovaj diplomski rad ima za cilj razviti Autonomni sustav za kontrolu i praćenje (ASKP), koji efikasno kombinira vage i vizijske sustave za preciznu detekciju i mjerenje objekata u okviru operacija “Pick and Pack”. Sustav će koristiti dubinske (stereo) kamere za vizualnu detekciju objekata i senzore za mjerenje mase. Fokus će biti na razvoju programa u C++ za detekciju objekata koristeći YOLO algoritam, te na integraciji s logikom vaganja.
Specifični Zadaci
Izrada korisničkog sučelja: Kreiranje intuitivnog korisničkog sučelja za interakciju s vizijskim sustavom i vaga.
Trening YOLO modela za detekciju: Prikupljanje i anotacija podataka za trening YOLO modela, koristeći stereo kamere za dobivanje dubinskih informacija.
Implementacija YOLO modela u C++: Uključivanje treniranog YOLO modela u programski okvir razvijen u C++ za real-time detekciju objekata.
Integracija logike vaganja: Razvoj algoritma koji će povezati informacije dobivene od vaga s detektiranim objektima, te provjeriti jesu li masa i identitet objekta sukladni.
Testiranje i evaluacija: Provođenje testiranja sustava u različitim uvjetima i analiza rezultata kako bi se potvrdila točnost i robusnost implementiranih algoritama.
Metodologija
Razvoj će se izvesti koristeći programski jezik C++ i relevantne biblioteke za obradu slika i senzorskih podataka. Za trening YOLO modela koristit će se anotirani set podataka, dok će se za testiranje i evaluaciju koristiti realni objekti i uvjeti.
Literatura i Suradnja
U radu je neophodno citirati relevantnu literaturu i metode. Također treba navesti moguću pomoć ili suradnju dobivenu od mentora ili suradnika.
For more details on this topic, please contact dr. sc. Filip Šuligoj
Development of an end-effector for physical human-robot interaction and physiotherapy
Languge of the Master thesis: English
Mentor: Doc. dr. sc. Marko Švaco
Comentor: Doc. dr. sc. Tadej Petrič – homepage
Musculoskeletal disorders (MSDs) are referred to as the pandemic of the modern world. They account for the majority of all recognized diseases in the European Union and cause millions of lost working days each year. MSDs are soft tissue injuries caused by sudden impact, force, vibration, and unbalanced positions. The treatment of MSDs has been summarized in several clinical practice guidelines.
In the scope of this thesis, a detailed state-of-the-art analysis of active projects and research in the field of robotic physiotherapy needs to be done. All types of physiotherapy should be investigated such as physical contact, massage, ultrasound, heat, etc.
In the scope of the thesis, a prototype of a robotic end-effector based on the human hand should be researched, developed, and tested in the Laboratory for medical robotics at CRTA on a robot arm with position and impedance control.
This task details investigation into biomechanics and the anatomy of a human hand (palm, fingers, thumb, fist) used in physiotherapy. The developed end-effector of the collaborative robot is intended to reproduce therapeutic movements and apply forces on a human subject in a laboratory mockup scenario. Important mechanical (stiffness, hardness, elasticity, etc.) and physical properties (induced pressure, temperature, friction, etc.) should be measured with the purpose of developing a highly effective end-effector.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Dual-handed assembly of a fuse housing
With the increasing application of dual-arm industrial robots, the possibilities are significantly expanded compared to single-arm robotic workstations. Within the laboratory for artificial intelligence, there is a dual-arm robotic system equipped with 15 degrees of freedom, two 2D industrial cameras, tool changers, grippers, and a worktable with an industrial product - a fuse housing. In order to achieve complete automation and robotization of the fuse housing assembly process, with the existing dual-arm Yaskawa CSDA10F is is necessary:
- to reshape and enhance the machine vision system (hardware and software) to make it robust and functional,
- to reshape and enhance the robotic tools, tool holders, magazines, pallets, fixtures, and delivery paths used for the preparation and positioning of the components in the fuse housing assembly,
- to develop an algorithm for learning the desired arrangement of fuses and relays based on 2D perception and image processing,
- to program the process of autonomous assembly of fuse casings according to the learned schedule from the previous step,
- to create a simple graphical user interface (GUI) for controlling a robotic station,
- to develop and implement an algorithm for quality control (inspection) of the assembled fuse box enclosure.
The thesis must be validate on the equipment in the Laboratory for Artificial Intelligence. For the developed application it is necessary to design and manufacture all the required structural, mechatronic, and other elements/components. The demonstration on the laboratory equipment should be enabled in an automatic mode of operation through a user interface.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and dr.sc. Josip Vidaković.
Robotic handling of objects in an unstructured state
Industrial robots are increasingly being used in unstructured work environment where the goal is to manipulate objects with all six degrees of freedom (three translations and three rotations) unknown. In the Laboratory for Autonomous Systems at CRTA, the problem of extracting parts from a box using a stationary industrial 3D vision system needs to be solved on the existing experimental setup. As a preliminary research step, it is necessary to study previously conducted student works on similar topics. In this thesis, it is necessary:
- to develop the necessary constructon and programming solutions for automatic tool changing on a robot,
- to create a tool for calibrating the vision system and robotic arm
- to select at least nine workpieces of different shapes (rectangular, cylindrical, disc-shaped, flat, etc.) and different dimensions,
- for selected subjects it is necessary to examine, implement and describe all available functions for 3D detection and localization.
The thesis must be validate on the equipment in the Laboratory for Autonomous Systems. For the developed application it is necessary to design and manufacture all the required structural, mechatronic, and other elements/components using the available equipment it the laboratory. The demonstration on the laboratory equipment should be enabled in an automatic mode of operation through an arbitrary user interface.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Executing advanced missions using the KUKA KMR iiwa robot and the Robot Operating System (ROS2)
Mobile robot KUKA KMR iiwa has the possibility of programming and implementation using the KUKA Sunrise environment. The Sunrise environment requires robot programming in the JAVA programming language, which may not be practical for robotics engineers compared to Python or C++. Therefore, at the Norwegian University has been developed an interface that enables control of the mobile robot and reading its sensors using the ROS2 environment. In addition to easier programming in the ROS2 environment, one of the features of ROS2 is that it allows the application of other mapping, localization, and navigation algorithms, not just those provided by KUKA. The KUKA KMR mobile robot also includes the KUKA iiwa industrial collaborative robot, which can also be implemented in the ROS2 environment along with the MoveIt package, offering exceptional flexibility in working with the robot. In this thesis, it is necessary:
- to investigate and implement communication from ROS2 to the KUKA KMR robot (hardware interface)
- to investigate and implement communication from ROS2 to the KUKA iiwa robot using the MoveIt package
- to select the most appropriate algorithms for simultaneous localization and mapping and implement them on the robot
- to select the most suitable algorithm for autonomous navigation of the robot in space
- to define and execute the task of object retrieval, object manipulation, and object placement at a predefined location.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and Ph.D Branimir Ćaran.
Development of an interactive setup for the game of Tic-Tac-Toe
Ambient and motor intelligence enable people to navigate and adapt to many new situations. One of the areas in which the perception of the environment and human intelligence come to the fore are various games. One of the relatively simple games is the Tic-Tac-Toe game. To enable a robotic system to play the game of Tic-Tac-Toe against a human opponent, it requires the integration of various sensory and motor capabilities into the robotic system. Perception of the game board is a challenging task as robust perception is influenced by several variable parameters such as lighting direction and intensity, color, thickness, and dimensions of the "X" and "O" markers on the game board. Furthermore, motion planning for the robotic arm is not a trivial task as it requires avoiding collisions with the environment and planning movements that avoid singularities, large decelerations, and velocities of individual robot joints or the tool tip. On the existing Tic-Tac-Toe setup in the Laboratory for Autonomous Systems, it is necessary:
- to analyze the robot's workspace with the aim of increasing the effective playing area,
- to analyze and propose a new arrangement of the vision system (one or more cameras) for robust perception of the playing area on the game board,
- to develop and implement a computer vision algorithm for recognizing the planar position of the game board and the game symbols "X" and "O",
- to create a graphical user interface for interacting with the player and running the entire application,
- to analyze and verify each robotic motion before execution, using simulation software packages such as RoboDK,
- to make the necessary structural, control, and other modifications to the experimental setup,
- to create a procedure for automated calibration of vision systems and robots.
Master's thesis must be done on the existing setup with the UR5 robot in the Laboratory for Autonomous Systems in CRTA.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and dr.sc. Filip Šuligoj.
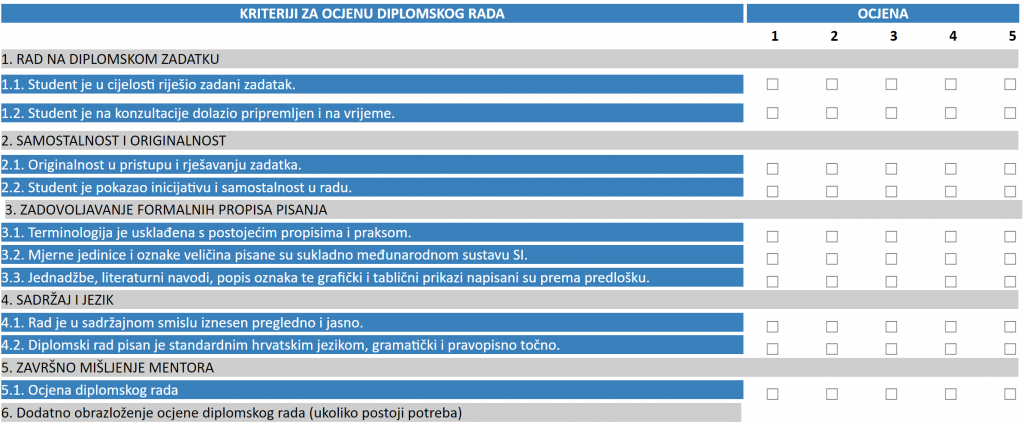
Grading criteria for graduate theses
The graduate theses must be written according to the official guidelines of the FMENA. The grade of the mentor and comentor is formed by adherence to formal regulations and directions, but more importantly by work on the undergraduate thesis, independence, and originality. In addition to the individual grade of the graduate thesis, a grade is also awarded during the presentation in front of the committee.
Pozivamo sve studentice i studente da obavezno pročitaju sva rules and instructions vezane uz izradu diplomskih radova. Za upute za izradu prezentacije diplomskog rada obratite se izravno vašem mentoru.
The website was co-financed by the European Union from the European Regional Development Fund.
The content of the website is the sole responsibility of the Faculty of Mechanical Engineering and Naval Architecture.