Dostupne teme diplomskih radova
Obavezno pročitati: kratke upute i pravila
Za sve studentice i studente koje zanimaju dosad napravljeni diplomski radovi u CRTA-i, radove mogu pogledati ovdje. Svi diplomski radovi napravljeni u sklopu starog laboratorija obranjeni su prije 2021. godine. Svi radovi iz 2021. i 2022. godine napravljeni su u i implementirani u CRTA-i. Od studentica i studenata koji odaberu temu diplomskog rada očekuje se aktivan angažman te odgovoran rad na zadanoj temi. Svim studentima koji odaberu diplomski rad na jednu od dolje ponuđenih tema bit će osigurana sva potrebna oprema, te radna mjesta i (dijeljeno) računalo u laboratoriju i/ili praktikumima. Ukoliko diplomski rad uključuje i eksperimentalan dio, studentima će biti omogućen rad u pripadajućem laboratoriju u kojem će se izvoditi eksperimenti: Laboratorij za autonomne sustave, Laboratorij za medicinsku robotiku ili Laboratorij za računalnu inteligenciju. Uz rad u laboratorijima svim studentima su na raspolaganju i dva praktikuma čiji raspored zauzeća je moguće vidjeti ovdje. Prilikom rada u laboratorijima i praktikumima studentice i studenti se moraju pridržavati svih pravila ponašanja te pravila korištenja računalne, laboratorijske i ostale opreme. Nakon rada radna mjesta u CRTA-i potrebno je uvijek ostaviti čista i uredna.
Uz laboratorije i laboratorijsku opremu, u studentskom dijelu CRTA-e studentima su na raspolaganju 3D printeri, razni studentski alat u i oprema koji su nužni za veći broj tema koje uključuju praktični i eksperimentalni rad.
Za rad sa studentskim i ostalim alatom zadužen je istraživač Luka Rabuzin te će vas Luka uputiti u sva pravila kad počnete raditi na svojoj temi.
Vezano uz neka općenita pitanja i iskustva studenata uvijek se možete javiti našim trenutnim studentima, diplomantima ili demosima.
Što je to “Projekt” i kako je povezan s diplomskim radom?
Projekt iz 9. semestra studija koji prethodi upisu diplomskog rada nužan je preduvjet za prijavu teme diplomskog rada ukoliko je mentor ili komentor nastavnik iz CRTA-e. Tema projekta usko je povezana s temom diplomskog rada te čini cjelinu s diplomskim radom. Prilikom upisa projekta u Studomatu potrebno je dogovoriti se s budućim mentorom ili komentorom o opsegu Projekta. Projekt u pravilu uključuje rješavanje određenih dijelova iz teme diplomskog rada (jedan dio natuknica iz svake dolje opisane teme). Projekt se predaje mentoru (i komentoru) u digitalnom obliku.
Pisanje i predaja diplomskog rada
Diplomski rad potrebno je pisati u skladu sa službenim uputama i predlošku diplomskog rada koji se nalaze ovdje. Prije pisanja diplomskog rada potrebno je detaljno proučiti sve materijale te se za bilo kakva pitanja javiti mentoru ili komentoru.
Prije početka pisanja predlaže se usuglasiti strukturu rada s mentorom ili komentorom. S obzirom na odabran termin predaje diplomskog rada, cjelovito napisani diplomski rad potrebno je predati mentoru ili komentoru na čitanje (word i pdf verzije) mailom najmanje 10 dana prije službenog roka za predaju. Diplomski rad poslan na čitanje mora biti kompletan i pravopisno ispravan (obavezno napraviti provjeru na ispravi.me).
Popis dostupnih tema
- Development of an end-effector for physical human-robot interaction and physiotherapy
- Upravljanje robotskom medicinskom bušilicom i eksperimenti bušenja kranijalne kosti (za više informacija javiti se doc. dr. sc. Marku Švaci)
- Istraživanje i razvoj robotski potpomognutog sustava za navigaciju kirurga prilikom operacije koljena (za više informacija javiti se doc. dr. sc. Marku Švaci)
- Upravljanje flotom mobilnih robota u ROS2 okruženju
- Razvoj interaktivnog postava za igru križić kružić
- Autonomno punjenje električnih vozila koristeći robotsku ruku
- Dvoručna montaža kućišta osigurača
- Robotsko rukovanje predmetima u nesređenom stanju
- Izvršavanje naprednih misija primjenom robota KUKA KMR iiwa i robotskog operativnog sustava (ROS2) – zauzeto
Popis tema 2023./2024. – doc. dr. sc. Filip Šuligoj
- —(rezervirano)—Ekstrinzična kalibracija robotskog in-hand stereovizijskog sustava pomoću neuronskih mreža
- Estimacija Pozicije Glave Pacijenta u 3D Snimkama Računalne Tomografije s Primjenom u Robotiziranoj Neurokirurgiji
- —(rezervirano)—Kontrola sile pomoću robotskog sustava za interakciju s zakrivljenim površinama
- —(rezervirano)—Integracija metoda strojnog vida i učenja za automatiziranu detekciju, lokalizaciju i verifikaciju mikroprocesorskih pločica
- —(rezervirano)—Robotski sustav za autonomnu navigaciju i manipulaciju objektima
- Automatizacija ekstrinzične kalibracije “Oko-u-Ruci” robotskog sustava
- Razvoj i implementacija sustava za kontrolu i praćenje pakiranja s integracijom mjernih vaga i vizijskog Sustava
Ukoliko vas zanima neko područje ili tema koja nije predložena slobodno možete predložiti vlastite teme, ideje i projekte nekome od zaposlenika u CRTA-i te potom prijedlog vaše teme možete dogovoriti s potencijalnim mentorom i/ili komentorom i suradnicima na temi. Za bilo kakva druga pitanja slobodno se možete javiti mailom nastavniku zaduženom za pojedinu temu ili doći u vrijeme konzultacija.
Detaljan opis dostupnih tema
Ekstrinzična kalibracija robotskog in-hand stereovizijskog sustava pomoću neuronskih mreža
Ovaj rad istražuje upotrebu neuronskih mreža za ekstrinzičnu kalibraciju robotskog in-hand stereovizijskog sustava, ključnog za preciznu lokalizaciju u prostoru. Ovi sustavi nalaze primjenu u industriji, medicini i znanstvenom istraživanju. Konvencionalne kalibracijske metode često su suboptimalne zbog izazova kao što su šum i optičke nelinearnosti. Rad predlaže neparametarsku kalibraciju temeljenu na neuronskim mrežama, koja povećava robusnost i fleksibilnost sustava, te omogućuje automatizaciju procesa, unapređujući time efikasnost i brzinu kalibracije.
U radu se koristiti postojeći stereo vizijski sustav, s makro objektivima i automatskim algoritmom za preciznu lokalizaciju retroreflektivnih sfera. Stereo vizijski sustav treba uz inkrementalne pomake robotske ruke u zadane pozicije strukturirano pohranjivati 3D pozicije robota i piksel koordinate centara lokalizirane sfere, koji zajedno čine kalibracijski trening set za neuronsku mrežu.
Istraživanje obuhvaća sljedeće korake:
- Programirati robota i komunikaciju sa stereo-vizijskim sustavom za proceduru izrade kalibracijskog seta podataka
- Predložiti veličinu i konfiguraciju seta za potrebe treniranja neuronske mreže (za lokalizaciju se koriste referentne retro-reflektivne sfere)
- Istražiti i implementirati modele neuronskih mreža koje mogu učinkovito povezati koordinate centara sfera u slikama stereo-vizijskog sustava s poznatim 3D robotskim pozicijama.
- Evaluirati utjecaj različitih modela i parametara neuronskih mreža na točnost i robusnost kalibracije
- Validirati točnost ekstrinzične kalibracije pomoću neuronske mreže korištenjem pozicija koje nisu bile dio trening seta i računanjem euklidske greške (poznato i očekivano).
Rad treba sadržavati pregled relevantne literature i detaljno opisati korištene metode i algoritme, kao i evaluaciju dobivenih rezultata u kontekstu primjenjivosti u stvarnim aplikacijama. Također je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Estimacija Pozicije Glave Pacijenta u 3D Snimkama Računalne Tomografije s Primjenom u Robotiziranoj Neurokirurgiji
Rad se fokusira na robusnu estimaciju pozicije glave pacijenta u 3D snimkama računalne tomografije (CT), što je od presudne važnosti u kontekstu rastuće automatizacije i primjene robota u neurokirurgiji. Stereotaktičke operacije na mozgu, koje se sve češće izvode uz pomoć robota, zahtijevaju visoku preciznost u lokalizaciji tumora i drugih patoloških stanja. Estimacija pozicije glave postaje stoga ključni element za uspjeh ovakvih kirurških zahvata. Iako su informacije o položaju glave često dostupne kao metapodaci u DICOM formatu, njihova potvrđena točnost je imperativ zbog kliničkog utjecaja.
Metodologija istraživanja uključuje:
- Razvoj i implementaciju algoritama za preciznu estimaciju pozicije glave temeljenih na geometrijskoj analizi facijalnih karakteristika i antropomorfnih orijentira (npr. nos, oči).
- Primjenu i evaluaciju različitih metoda, uključujući analizu svojstvenih vrijednosti i filtraciju biomedicinskih slika na temelju Hounsfieldovih vrijednosti za tkiva različite gustoće.
- Usporedbu i analizu točnosti i robusnosti različitih pristupa, s posebnim fokusom na njihovu primjenjivost u robotiziranoj neurokirurgiji.
- Validaciju metoda korištenjem neovisnih, realnih (anominiziranih) CT snimaka ljudske glave.
Rad će obuhvatiti sveobuhvatan pregled relevantne literature, detaljni opis korištenih metoda i algoritama, te evaluaciju dobivenih rezultata s obzirom na njihovu kliničku primjenjivost. U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Kontrola sile pomoću robotskog sustava za interakciju s zakrivljenim površinama
Funkcionalnost kontrole sile postaje sve značajnija u modernoj robotici, gdje se od robota očekuje ne samo sposobnost vizualne percepcije okruženja, već i napredna interakcija sa istim. Ovo uključuje sposobnost robota da interpretira i reagira na različite fizičke parametre, kao što su sila i moment, u realnom vremenu. Takva vrsta interakcije omogućuje robotima da se adekvatno prilagode složenim i dinamičnim okruženjima, što je ključno za buduće primjene u industriji, zdravstvu i drugim sektorima.
Za ovu svrhu u radu se predlaže koristiti ROS2 (Robot Operating System 2), koji omogućuje integraciju i kontrolu različite opreme i njihove funkcionalnosti. Kao hardverska komponenta koristi se Franka Panda robot u kombinaciji s Realsense D435 dubinskom kamerom.
Zadaci istraživanja uključuju:
1. Dizajniranje prilagodljivog robotskog alata (dubinska kamera u ruci i sferni krajnji alat) koji se može montirati na postojeću čeljust i zakrivljeni radni komad.
2. Upotreba ROS2 za integraciju funkcionalnosti i kontrolu robota te akviziciju podataka point clouda.
3. Implementacija kontrole sile kako bi se održavao konstantan kontakt sa zakrivljenom površinom.
4. Postavljanje scenarija u kojem robot pomiče alat kako bi pokrio linearni put, planiran na temelju oblaka točaka dobivenog dubinskom kamerom, preko zakrivljene površine održavajući konstantnu silu.
5. Analiza rezultata, posebno točnosti pri održavanju konstantne sile i planirane putanje. Rad će sadržavati detaljan pregled literature koja je relevantna za kontrolu sile i vizualizaciju u robotici. Također će se opisati metode i algoritmi korištene za implementaciju kontrolnih shema i akviziciju oblaka točaka. Evaluacija će se provesti kako bi se utvrdila točnost i robusnost implementirane kontrole sile na zakrivljenim površinama. U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Integracija metoda strojnog vida i učenja za automatiziranu detekciju, lokalizaciju i verifikaciju mikroprocesorskih pločica
U kontekstu brzog razvoja tehnologije i masovne proizvodnje sofisticiranih elektroničkih komponenti, kontrola kvalitete ostaje izazovna i ekonomski zahtjevna. Posebno je strojni vid, koji koristi tehnologiju kamere za prikupljanje informacija, postao presudan alat u industrijskim kontrolnim procesima. U ovom radu integriramo kombinaciju strojnog vida i učenja, konkretno neuronskih mreža, za kontrolu kvalitete kod mikroprocesorskih pločica.
Specifični zadaci istraživanja obuhvaćaju:
- Akvizicija slika navedenih mikroprocesorskih pločica pod različitim uvjetima osvjetljenja i orijentacija, koristeći industrijsku kameru.
- Anotaciju i kreiranje seta podataka za treniranje neuronske mreže.
- Primjena YOLO (You Only Look Once) neuronske mreže i algoritama strojnog vida za detekciju, lokalizaciju i verifikaciju elemenata na različitim mikroprocesorskim pločicama kao što su Arduino UNO, Jetson NX Xavier, Raspberry Pi, STM32 i UP board.
- Analiza i evaluacija performansi modela u različitim uvjetima, fokusirajući se na robusnost modela u kontekstu varijacija u orijentaciji, oštećenjima objekata i uvjetima osvjetljenja.
U radu je potrebno navesti korištenu literaturu te eventualno dobivenu pomoć od strane mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Robotski sustav za autonomnu navigaciju i manipulaciju objektima
U kontekstu razvoja autonomnih robotskih sustava za industrijske i logističke aplikacije, ovaj rad fokusira se na integraciju autonomne mobilne platforme s robotskom rukom. Specifični hardver uključuje Waypoint Vector mobilnu robotsku platformu, Franka Emika Panda robotsku ruku s kontrolerom, UPS sustav za napajanje i računalo. Ova konfiguracija pruža nove mogućnosti za automatizaciju različitih zadataka, koji zahtijevaju navigacija i manipulaciju objektima.
Specifični zadaci istraživanja su sljedeći:
- Dizajn, sastavljanje i povezivanje svih fizičkih komponenti sustava, uključujući mobilnu platformu, robotsku ruku, UPS i računalo.
- Konfiguracija ROS okruženja i njegova integracija sa svim fizičkim komponentama sustava.
- Demonstracija sposobnosti autonomnog kretanja mobilne platforme do višestrukih fizičkih lokacija unutar Laboratorija (u prostoru CRTA).
- Demonstracija izvođenja zadatka paletizacije koju robotska ruka treba obaviti na odabranim lokacijama.
- Analiza i evaluacija performansi sustava za potvrdu robusnosti i učinkovitosti predložene implementacije.
U radu je neophodno citirati relevantnu literaturu i metode te navesti moguću pomoć dobivenu od mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Automatizacija ekstrinzične kalibracije “Oko-u-Ruci” robotskog sustava
U svjetlu sveprisutne primjene robotskih sistema u industriji i istraživanju, ovaj rad fokusira se na razvoj i implementaciju automatskog sustava za kalibraciju prostornog odnosa između robotske ruke i ugrađenog 3D vizijskog sustava. Točnije, cilj je izračunati matricu transformacije između prirubnice robota i koordinatnog sustava 3D kamere, poznate kao ekstrinzična kalibracija u “oko-u-ruci” konfiguraciji.
Specifični zadaci diplomskog rada uključuju:
- Pregled i implementacija metoda za kalibraciju: proučavanje i analiza postojećih metoda za ekstrinzičnu kalibraciju, s implementacijom odabrane metode.
- Dizajniranje i izrada nosača za 3d kameru: projektiranje i izrada nosača koji će omogućiti montiranje 3d kamere na prirubnicu robotske ruke.
- Konfiguracija operativnog i programerskog okruženja: instalacija i postavljanje potrebnog softverskog okruženja, uključujući operativni sustav i programerske alate, za učinkovitu komunikaciju i kontrolu sustava.
- Uspostava komunikacijskog protokola: razvijanje i testiranje komunikacijskog protokola između robota, računala i 3d vizijskog sustava.
- Izrada kalibracijske procedure i programa: razvoj softverskog rješenja koje, u kombinaciji s kalibracijskim objektom, automatizira proces kalibracije 3d kamere.
- Evaluacija točnosti kalibracije: provođenje eksperimentalnih mjerenja i analize kako bi se utvrdila točnost i robusnost implementiranog kalibracijskog procesa.
U radu je neophodno citirati relevantnu literaturu i metode te navesti moguću pomoć dobivenu od mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Razvoj i implementacija sustava za kontrolu i praćenje pakiranja s integracijom mjernih vaga i vizijskog Sustava
Ovaj diplomski rad ima za cilj razviti Autonomni sustav za kontrolu i praćenje (ASKP), koji efikasno kombinira vage i vizijske sustave za preciznu detekciju i mjerenje objekata u okviru operacija “Pick and Pack”. Sustav će koristiti dubinske (stereo) kamere za vizualnu detekciju objekata i senzore za mjerenje mase. Fokus će biti na razvoju programa u C++ za detekciju objekata koristeći YOLO algoritam, te na integraciji s logikom vaganja.
Specifični Zadaci
Izrada korisničkog sučelja: Kreiranje intuitivnog korisničkog sučelja za interakciju s vizijskim sustavom i vaga.
Trening YOLO modela za detekciju: Prikupljanje i anotacija podataka za trening YOLO modela, koristeći stereo kamere za dobivanje dubinskih informacija.
Implementacija YOLO modela u C++: Uključivanje treniranog YOLO modela u programski okvir razvijen u C++ za real-time detekciju objekata.
Integracija logike vaganja: Razvoj algoritma koji će povezati informacije dobivene od vaga s detektiranim objektima, te provjeriti jesu li masa i identitet objekta sukladni.
Testiranje i evaluacija: Provođenje testiranja sustava u različitim uvjetima i analiza rezultata kako bi se potvrdila točnost i robusnost implementiranih algoritama.
Metodologija
Razvoj će se izvesti koristeći programski jezik C++ i relevantne biblioteke za obradu slika i senzorskih podataka. Za trening YOLO modela koristit će se anotirani set podataka, dok će se za testiranje i evaluaciju koristiti realni objekti i uvjeti.
Literatura i Suradnja
U radu je neophodno citirati relevantnu literaturu i metode. Također treba navesti moguću pomoć ili suradnju dobivenu od mentora ili suradnika.
Za više detalja o ovoj temi javiti se dr. sc. Filipu Šuligoju.
Development of an end-effector for physical human-robot interaction and physiotherapy
Languge of the Master thesis: English
Mentor: Doc. dr. sc. Marko Švaco
Comentor: Doc. dr. sc. Tadej Petrič – homepage
Musculoskeletal disorders (MSDs) are referred to as the pandemic of the modern world. They account for the majority of all recognized diseases in the European Union and cause millions of lost working days each year. MSDs are soft tissue injuries caused by sudden impact, force, vibration, and unbalanced positions. The treatment of MSDs has been summarized in several clinical practice guidelines.
In the scope of this thesis, a detailed state-of-the-art analysis of active projects and research in the field of robotic physiotherapy needs to be done. All types of physiotherapy should be investigated such as physical contact, massage, ultrasound, heat, etc.
In the scope of the thesis, a prototype of a robotic end-effector based on the human hand should be researched, developed, and tested in the Laboratory for medical robotics at CRTA on a robot arm with position and impedance control.
This task details investigation into biomechanics and the anatomy of a human hand (palm, fingers, thumb, fist) used in physiotherapy. The developed end-effector of the collaborative robot is intended to reproduce therapeutic movements and apply forces on a human subject in a laboratory mockup scenario. Important mechanical (stiffness, hardness, elasticity, etc.) and physical properties (induced pressure, temperature, friction, etc.) should be measured with the purpose of developing a highly effective end-effector.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci.
Dvoručna montaža kućišta osigurača
Primjena dvoručnih industrijskih robota sve je češća jer omogućava značajno proširenje mogućnosti u odnosu na robotska radna mjesta s jednom robotskom rukom. U sklopu laboratorija za računalnu inteligenciju nalazi se dvoručni robotski sustav opremljen sa 15 stupnjeva slobode gibanja, dvije 2D industrijske kamere, izmjenjivačima alata, hvataljkama te radnim stolom s industrijskim proizvodom – kućištem osigurača. S ciljem potpune automatizacije i robotizacije procesa sklapanja kućišta osigurača, s postojećim dvoručnim robotom Yaskawa CSDA10F potrebno je:
- preoblikovati i unaprijediti sustav strojnog vida (hardver i softver) te ga učiniti robusnim i funkcionalnim,
- preoblikovati i unaprijediti robotske alate, stalke za alate, magazine, palete, gnijezda i dostavne staze koje se koriste za pripremu i pozicioniranje ugradbenih elemenata kućišta osigurača,
- razviti algoritam za učenje zadanog rasporeda osigurača i releja temeljem 2D percepcije i obrade slike,
- programirati proces autonomnog sklapanja kućišta osigurača prema naučenom rasporedu iz prethodne točke,
- napraviti jednostavno grafičko sučelje za upravljanje robotskom stanicom,
- razviti i implementirati algoritam za kontrolu kvalitete (provjeru) sklopljenog kućišta osigurača.
Rad je potrebno validirati na opremi u Laboratoriju za računalnu inteligenciju. Za razvijenu aplikaciju potrebno je oblikovati i izraditi sve potrebne konstrukcijske, mehatroničke i ostale elemente/komponente. Demonstracija na opremi u laboratoriju treba biti omogućena u automatskom režimu rada putem korisničkog sučelja.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci i dr. sc. Josipu Vidakoviću.
Robotsko rukovanje predmetima u nesređenom stanju
Industrijski roboti sve se više koriste u nestrukturiranim ranim okolinama gdje je cilj rukovanje predmetima kojima su svih šest stupnjeva slobode gibanja (tri translacije i tri rotacije) nepoznate. U laboratoriju za autonomne sustave u CRTA-i na postojećem eksperimentalnom postavu potrebno je riješiti problem izuzimanja dijelova iz kutije koristeći stacionarni industrijski 3D vizijski sustav. Kao prethodno istraživanje potrebno je proučiti do sada napravljene studentske radove na slične teme. U sklopu ovog rada potrebno je:
- napraviti potrebna konstrukcijska i programska rješenja za automatsku izmjenu alata na robotu,
- izraditi alat za kalibraciju vizijskog sustava i robotske ruke,
- odabrati najmanje devet predmeta rada različitih oblika (kutijasti, cilindrični, diskasti, plosnati, itd.) i različitih dimenzija,
- za odabrane predmete potrebno je ispitati, implementirati i opisati sve dostupne funkcije za 3D detekciju i lokalizaciju.
Rad je potrebno validirati na opremi u Laboratoriju za autonomne sustave. Za razvijenu aplikaciju potrebno je oblikovati i izraditi sve potrebne konstrukcijske, mehatroničke i ostale elemente/komponente koristeći dostupnu opremu u laboratoriju. Demonstracija na opremi u laboratoriju treba biti omogućena u automatskom režimu rada putem proizvoljnog korisničkog sučelja.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci.
Izvršavanje naprednih misija primjenom robota KUKA KMR iiwa i robotskog operativnog sustava (ROS2)
Mobilni robot KUKA KMR iiwa ima mogućnost programiranja i implementiranja primjenom KUKA Sunrise okruženja. Sunrise okruženje zahtjeva programiranje robota u JAVA programskom jeziku koje za inženjere robotike nije praktično poput Pythona ili C++, stoga je na Norveškom sveučilištu razvijen interface koji omogućuje upravljanje mobilnim robotom i čitanje njegovih senzora primjenom ROS2 okruženja. Osim lakšeg pisanja programa u ROS2 okruženju, odlika ROS2 je ta što nudi mogućnost primjene drugih algoritama mapiranja, lokalizacije i navigacije u prostoru, a ne samo KUKA-inih. KUKA KMR mobilni robot na sebi sadrži i KUKA iiwa industrijski kolaborativni robot koji također ima opciju implementacije u ROS2 okruženju zajedno s MoveIt paketom što nudi iznimnu fleksibilnost u radu s robotom. U sklopu rada potrebno je:
- istražiti i implementirati komunikaciju iz ROS2 prema KUKA KMR robotu (hardware interface)
- istražiti i implementirati komunikaciju iz ROS2 prema KUKA iiwa robotu primjenom MoveIt paketa
- odabrati najadekvatnije algoritme za simultanu lokalizaciju i mapiranje prostora te ih implementirati na robotu
- odabrati najadekvatniji algoritam za autonomno navigiranje robota po prostoru
- definirati i izvesti zadatak odlaska po predmet, izuzimanja predmeta i odlaganja istog na prethodno definirano mjesto
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci i doktorandu Branimiru Ćaranu.
Razvoj interaktivnog postava za igru križić kružić
Ambijentalna i motorička inteligencija omogućuju ljudima snalaženje i prilagodbu na mnoge nove situacije. Jedno od područja u kojima percepcija okoline te ljudska inteligencija dolaze do izražaja su razne igre. Jedna od relativno jednostavnih igara je igra križić-kružić. Kako bi se robotskom sustavu omogućilo igranje ove igre protiv ljudskog protivnika, to zahtjeva integraciju mnogih senzorskih i motoričkih sposobnosti na robotski sustav. Percepcija radne površine za igru izazovan je zadatak jer na robusnu percepciju utječe niz varijabilnih parametar kao što su smjer i jačina svjetla, boja, debljina i dimenzija oznaka „x“ i „o“ na radnoj površini (ploči). Nadalje, planiranje kretanja robotske ruke nije trivijalan zadatak jer je potrebno izbjeći kolizije s okolinom te planirati takve kretnje koje ne prolaze kroz singularitete niti imaju velike deceleracije i brzine individualnih zglobova niti vrha alata robota. Na postojećem postavu za igru križić-kružić u laboratoriju za autonomne sustave potrebno je:
- analizirati radni prostor robota s ciljem povećanja efektivnog područja za igru,
- analizirati i predložiti novi raspored vizijskog sustava (jedne ili više kamera) za robusnu percepciju radnog područja igraće ploče,
- razviti i implementirati algoritam strojnog vida za prepoznavanje ravninskog položaja polja za igru te znakova za igru „x“ i „o“,
- napraviti grafičko korisničko sučelje za interakciju s igračem te za pokretanje cijele aplikacije
- svaku robotsku kretnju prije izvođenja potrebno je analizirati i provjeriti u simulacijskom programskom paketu kao što je RoboDK,
- napraviti potrebne konstrukcijske, upravljačke i ostale izmjene na eksperimentalnom postavu,
- izraditi proceduru za automatiziranu kalibraciju vizijskih sustava i robota.
Diplomski rad potrebno je napraviti na postojećem postavu s UR5 robotom u laboratoriju za autonomne sustave u CRTA-i.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci i dr. sc. Filipu Šuligoju.
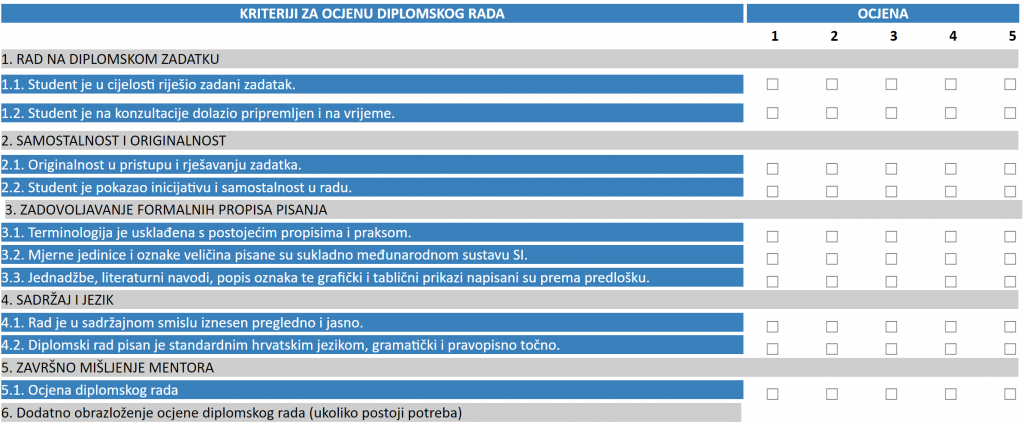
Kriteriji ocjene diplomskih radova
Diplomske radove potrebno je pisati prema svim službenim uputama FSB-a. Sukladno pridržavanju formalnih pravila i naputaka, a ponajviše rada na diplomskom radu, samostalnosti i originalnosti formira se ocjena mentora i komentora. Uz pojedinačnu ocjenu diplomskog rada, prilikom prezentacije pred povjerenstvom dodjeljuje se ocjena iz prezentacije diplomskog rada.
Pozivamo sve studentice i studente da obavezno pročitaju sva pravila i naputke vezane uz izradu diplomskih radova. Za upute za izradu prezentacije diplomskog rada obratite se izravno vašem mentoru.
Izradu internetske stranice je sufinancirala Europska unija iz Europskog fonda za regionalni razvoj.
Sadržaj internetske stranice isključiva je odgovornost Fakulteta strojarstva i brodogradnje.